 Get in touch
Get in touch

1. Introduktion: Dekonstruktion af AC induktionsmotor hestekræfter AC-induktionsmotoren er en af de m...
LÆS MEREIndustri nyheder
2026-04-21
En DC (jævnstrøm) motor omdanner elektrisk energi til mekanisk rotation ved hjælp af interaktionen mellem et magnetfelt og en strømførende leder. Driftsprincippet følger af Lorentz kraftloven: når elektrisk strøm løber gennem en leder placeret inde i et magnetfelt, oplever lederen en kraft vinkelret på både strømretningen og feltretningen. Arranger nok strømførende ledere i en roterende enhed, og den kraft bliver kontinuerligt rotationsmoment.
Rent praktisk indeholder en jævnstrømsmotor to grundlæggende magnetiske systemer. Den stator giver et stationært magnetfelt - enten fra permanente magneter eller elektromagneter (feltviklinger). Den rotor (også kaldet ankeret) bærer ledere forbundet til en ekstern jævnstrømsforsyning. Strøm, der strømmer gennem rotorlederne, reagerer med statorfeltet for at generere drejningsmoment, der roterer rotoren. Så længe der er DC-spænding, fortsætter motoren med at rotere.
Hastigheden i en jævnstrømsmotor styres primært af den påførte spænding: højere spænding giver hurtigere rotation. Momentudgangen er proportional med ankerstrømmen. Dette ligefremme forhold mellem spænding, strøm, hastighed og drejningsmoment gør DC-motorer usædvanligt nemme at kontrollere over et bredt driftsområde - en egenskab, der forklarer deres fortsatte dominans i applikationer med variabel hastighed.
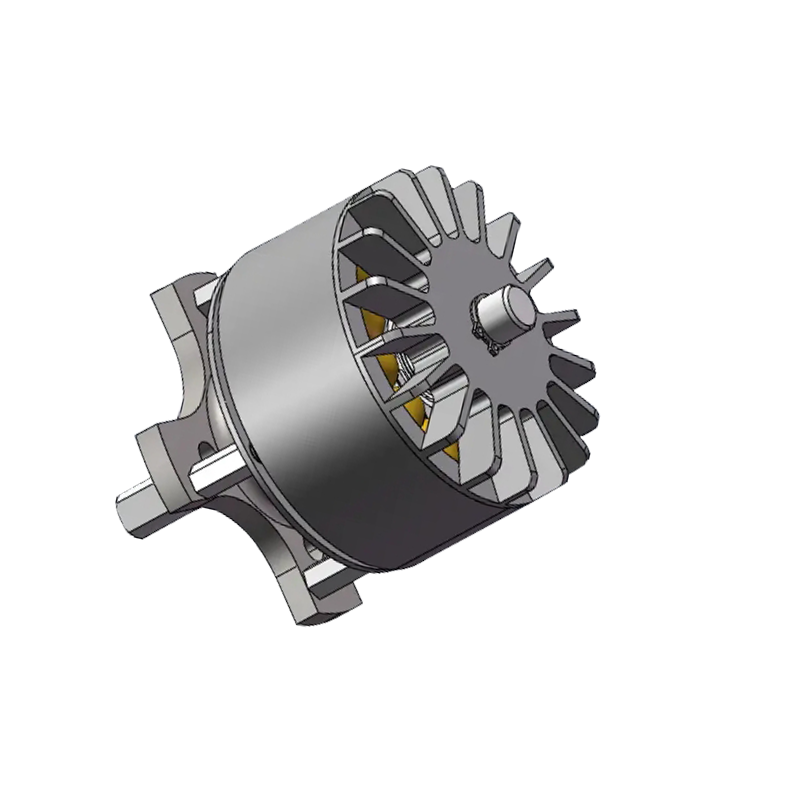
Den interne arkitektur af en jævnstrømsmotor varierer mellem børstede og børsteløse designs, men flere kernekomponenter er fælles på tværs af begge typer.
Statoren er den stationære ydre enhed af motoren. I DC-motorer med små og brøkdele hestekræfter produceres statorfeltet af permanente magneter, der er fastgjort til motorhusets indre boring. I større industrielle DC-motorer bærer statoren feltviklinger - spoler af tråd viklet omkring polstykker - gennem hvilke en separat DC-excitationsstrøm strømmer for at skabe magnetfeltet. Statorrammen er typisk lamineret siliciumstål for at minimere hvirvelstrømstab.
Rotoren er den roterende enhed monteret på motorakslen. Den består af en lamineret jernkerne med slidser bearbejdet rundt om dens omkreds, hvori ankerviklingerne er viklet ind. Den laminerede konstruktion reducerer hvirvelstrømstab i strygejernet. I børstede DC-motorer bærer rotoren de viklede spoler; i børsteløse jævnstrømsmotorer bærer rotoren i stedet permanentmagneterne.
Kommutatoren er en segmenteret kobberring monteret på rotorakslen. Hvert segment forbindes til en anden ankerspole. Kulbørster - fjederbelastede kontakter monteret i statorhuset - presser mod kommutatoroverfladen og bevarer den elektriske kontakt, mens akslen roterer. Når rotoren drejer, passerer kommutatorsegmenterne under børsterne i rækkefølge, og skifter automatisk strømretningen i hver spole på det rigtige tidspunkt for at holde drejningsmomentet i en ensartet rotationsretning. Denne mekaniske kobling er det, der definerer en børstet jævnstrømsmotor.
Armaturviklinger er isolerede kobberledere viklet ind i rotorslidserne. Viklingskonfigurationen - lap, wave eller simplex - bestemmer antallet af parallelle strømveje gennem ankeret og påvirker motorens hastighed-drejningsmomentkarakteristika. Feltviklinger på statoren, når de er til stede, er viklet for at producere det korrekte antal magnetiske poler til designhastigheden og drejningsmomentområdet.
Udgangsakslen overfører mekanisk drejningsmoment til belastningen. Præcisionskuglelejer eller bøsningslejer understøtter akslen i hver ende af huset og holder luftspalten mellem rotor og stator inden for snævre tolerancer. Huset (endeklokker og ramme) giver strukturel støtte, beskytter interne komponenter og inkorporerer i nogle designs køleribber eller monteringsanordninger til en ekstern ventilator.
I en børstet jævnstrømsmotor udfører kommutatoren og børsterne strømskiftefunktionen mekanisk. Når ankeret roterer, bevæger kommutatorsegmenterne sig forbi de stationære børstekontakter og forbinder hver ankerspole til forsyningen i rækkefølge. Dette sikrer, at uanset rotorens position, fører spolen, der i øjeblikket er på linje med statorpolspalten, altid strøm i den korrekte retning for at producere fremadrettet drejningsmoment.
Resultatet er en motor, der kører direkte fra en jævnstrømsforsyning uden behov for ekstern elektronisk kommutering. Tilslut en børstet DC-motor til et batteri eller reguleret DC-forsyning, og den roterer med det samme. Vend polariteten og den vender retningen. Denne enkelhed er den primære årsag til, at børstede motorer forbliver udbredt i omkostningsfølsomme applikationer med lav til medium kompleksitet.
Den mekaniske kontakt mellem børster og kommutator introducerer motorens vigtigste begrænsninger. Børste-kommutator-friktion genererer varme og slidaffald, og den buedannelse, der opstår, når segmenterne skifter, producerer elektromagnetisk interferens (EMI). Udskiftning af børster er typisk påkrævet hver 1.000-5.000 driftstimer afhængig af den aktuelle belastning, hastighed og driftsmiljø. Kommutatoroverfladen kræver også periodisk inspektion og genopbygning af overfladen.
Børstede jævnstrømsmotorer er ikke egnede til brug i brændbare eller eksplosive atmosfærer, fordi børstebue kan antænde omgivende gasser. De er også begrænset i maksimal hastighed af de mekaniske begrænsninger af børste-kommutator-kontakten, der typisk topper ud kl. 3.000–8.000 RPM i de fleste designs.

En børsteløs jævnstrømsmotor (BLDC) eliminerer kommutator- og børstesamlingen fuldstændigt ved at flytte de permanente magneter til rotoren og viklingerne til statoren. Strømomskiftning - kommutering - håndteres elektronisk af en motorcontroller, der overvåger rotorpositionen gennem Hall-effektsensorer eller tilbage-EMF-detektion og aktiverer statorspolerne i den korrekte rækkefølge for at opretholde rotation.
Denne arkitektoniske inversion har betydelige konsekvenser for ydeevne, vedligeholdelse og anvendelsesområde.
| Karakteristisk | Børstet jævnstrømsmotor | Børsteløs DC-motor |
|---|---|---|
| Kommuteringsmetode | Mekanisk (børste kommutator) | Elektronisk (controller sensorer) |
| Effektivitet | 75-85 % | 85-95 % |
| Vedligeholdelse | Regelmæssig udskiftning af børsten påkrævet | Minimal — kun lejer |
| Hastighedsområde | Typisk op til ~8.000 RPM | Op til 100.000 RPM muligt |
| EMI / buedannelse | Betydelig børstebuedannelse | Lav (ingen børstekontakt) |
| egnethed til farligt miljø | Ikke egnet (børstebuedannelse) | Velegnet (ingen buedannelse) |
| Krav til controller | Enkel DC-spændingsstyring | Der kræves dedikeret elektronisk controller |
| Enhedsomkostninger | Lavere | Højere (motorstyring) |
| Levetid | Begrænset af børsteslid | Længere - ingen slidte kontaktdele |
Effektivitetsfordelen ved børsteløse motorer er især betydelig i batteridrevne applikationer. Et el-køretøjs drivsystem eller elværktøj, der kører en BLDC-motor med 92 % effektivitet i forhold til en børstet ækvivalent på 80 %, omsættes direkte til længere driftstid pr. opladning og reduceret termisk belastning på batteripakken. Dette er den primære drivkraft bag det næsten universelle skift til børsteløse motorer i ledningsfrit elværktøj, elektriske køretøjer, droner og HVAC-systemer i løbet af de sidste to årtier.
På trods af ydelsesfordelene ved børsteløse designs, forbliver børstede DC-motorer det korrekte valg i flere anvendelseskategorier.
Et DC-motordrev (også kaldet et DC-drev eller DC-controller) er kraftelektronikpakken, der regulerer spændingen og strømmen, der leveres til en DC-motor for at kontrollere dens hastighed, drejningsmoment, acceleration og retning. Motoren og drevet danner tilsammen et komplet bevægelseskontrolsystem - motoren giver mekanisk output, og drevet styrer elektrisk input for at opnå den ønskede bevægelsesprofil.
Traditionelle børstede DC-drev bruger tyristor (SCR) fasekontrol eller PWM (pulsbreddemodulation) teknikker til at regulere ankerspændingen. Et fire-kvadrantdrev kan styre hastighed og drejningsmoment i begge rotationsretninger, hvilket muliggør regenerativ bremsning - hvor motoren fungerer som en generator under deceleration, og returnerer energi til forsyningsbussen. Denne egenskab er meget udbredt i industrielle applikationer såsom viklemaskiner, valseværker og hejseværker, hvor kontrolleret deceleration og energigenvinding har betydning.
Hastighedsreguleringsnøjagtigheden af et børstet DC-drev med lukket sløjfe med et omdrejningstællerfeedbacksignal er typisk ±0,1 % af indstillet hastighed , hvilket forklarer deres lange dominans inden for præcisionsindustriel bevægelsesstyring, før AC-frekvensomformere modnedes i 1990'erne.
En BLDC-motorstyring udfører elektronisk kommutering ved at aflæse rotorposition - via Hall-effektsensorer indlejret i motoren eller gennem sensorløs back-EMF-estimering - og skifte strøm gennem statorfaserne i den korrekte rækkefølge. Controlleren styrer også PWM duty cycle for at regulere hastigheden og overvåger strøm for at begrænse drejningsmomentet. Mere sofistikerede BLDC-drev implementerer feltorienteret kontrol (FOC), som optimerer vinklen mellem statorfeltet og rotormagneten for maksimalt drejningsmoment pr. ampere over hele hastighedsområdet.
I integrerede bevægelsessystemer - såsom robotled, servoakser og CNC-spindler - er BLDC-motoren og dens drev typisk parret og tunet sammen som et matchet sæt. Drevparametre, herunder strømsløjfebåndbredde, hastighedsløkkeforstærkning og kommuteringstidspunkt, konfigureres under idriftsættelse og lagres i drevets ikke-flygtige hukommelse.
Anvendelseslandskabet for børstede og børsteløse DC-motorer afspejler deres respektive styrker i omkostninger, vedligeholdelse, hastighedsområde og kontrolpræcision.
1. Introduktion: Dekonstruktion af AC induktionsmotor hestekræfter AC-induktionsmotoren er en af de m...
LÆS MERE1. Introduktion I moderne industriel automation, datacenterkonstruktion, forbrugerelektronik opgradering...
LÆS MEREStepmotorer repræsenterer en hjørnesten i moderne motion control og tilbyder præcis positionering og re...
LÆS MEREDet industrielle motorlandskab gennemgår en betydelig transformation, drevet af det ubarmhjertige ...
LÆS MERERelaterede produkter
Bygning 10, nr. 199, Jinfeng Road, Suzhou High-tech, Jiangsu-provinsen, Kina
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Copyright © Suzhou Retek Electric Technology Co., Ltd. Alle rettigheder forbeholdes. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













